




*trommelwirbel*
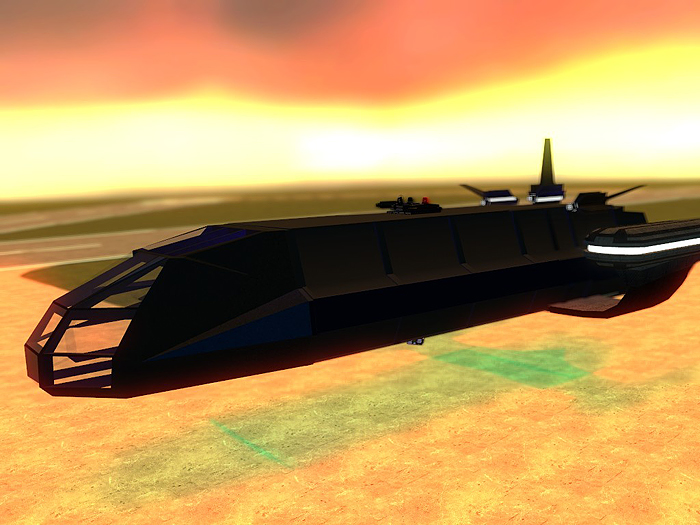
Ich präsentiere euch den ersten Prototypen der Bremen-Schiffsklasse:
Die Fregatte Emden.
Nachdem mein letztes Projekt (der Leo2, wer erinnert sich?) -nunja-
zu den Akten gelegt wurde *hust*, habe ich mich schon vor laaaaanger Zeit
einem neuen Projekt gewidmet. Nämlich diesem hier.
Heute mal wieder rausgekramt um euch den Crap zu präsentieren.
Die Fregatte Emden:
Fregatten sind die kleinstmöglichen Schiffe die noch in der Lage sind selbstständig Operationen durchzuführen.
Die Bremen-Klasse verfolgt dieses Ziel.
Das Schiff ist mittelmäßig stark bewaffnet, verfügt über eine eigene Energiequelle und weist für Defensivmaßnahmen ein Energieschild auf.
Zusätzlich sind für autarke Missionen noch ein Sonar und ein 2D-Radar an Bord. Später dazu mehr...
Ein paar Nekkid Pix:
Okay...das Ganze ist keine wirklich hübsche und anspruchsvolle Konstruktion.
Die Details sind im Inneren versteckt. Remember: Unabhängig durchführbare Missionen undso.
Das Schiff an sich:
[ame]http://www.youtube.com/watch?v=xB1WtN0V0mQ[/ame]
Verfügt über:
- eine vom Waffeningenieur zu bedienende Feuerleitanlage
- ein Energiemanagement (Hauptenergie - Schildenergie - Waffenenergie)
- ein vom Bordnetz betriebenes Schild
- Ein Sonarsystem
- Ein Radarsystem
Kurz zum Energiemanagement:
Der Generator selbst lädt die Hauptenergiezelle auf. Je nach Bedarf können
die Batterien des Schildes oder der Waffen sich Energie von dieser zapfen.
Also muss ein bisschen gewirtschaftet werden, ob man mehr Nutzen von Offensivtechnik (Bordbewaffnung)
oder der Defensivtechnik (Schilde) zieht.
Feuerleitsystem / Bewaffnung
Die Emden verfügt einen auf dem oberen Teil des Rumpfes montiertes Waffensystem, welches
eine Projektilkanone und einen Torpedowerfer enthält. Bedient wird das Ganze "by wire"
also vom Feuerleitsystem aus.
Okay. Too much blabla. More Video plzkthx (Buggy Displays @ Sourcerecorder)
[ame]http://www.youtube.com/watch?v=B4mTNO2d60U[/ame]
Hier sieht man übrigens noch kurz, dass ein zusätzliche Alarm ertönt, wenn der Schildstatus unter 30% geht.
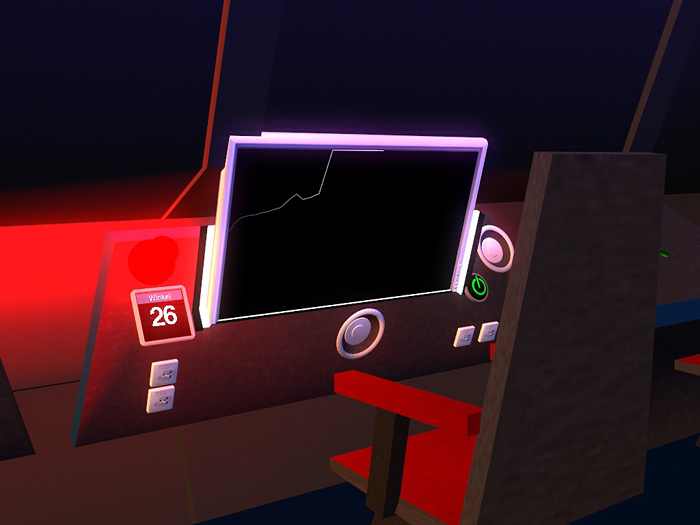
Radar-/Sonarsystem
Auf der Unterseite des Schiffes findet sich die kombinierte Sonar-/Radaranlage.
Innerbordlich sind die visuellen Einrichtungen dann platziert. Bei der Sonaranlage läuft ein Graph entlang der x-Achse.
Falls sich ein Hindernis in Reichweite der Außenbordanlage befindet, schlägt der Graph aus und wird vom typischen "Uboot-Ping"
begleitet. Je weiter das Objekt entfernt, desto größer der Ausschlag des Graphen (oder umgekehrt, das Ding hab ich vor
3 Monaten gebaut). So kann man mit etwas Übung ganz gut Strukturen erkennen.
Die Radaranlage ist recht ähnliche. Sie zeichnet praktisch eine 2D-Karte der Umgebung.
Naja...einfach wieder Video für looky looky.
Leider wieder verbuggte Displayanzeigen. Auf dem linken, kleinen Display sollte
eigentlich stehen ob und wie schnell der untere Turm sich dreht (einstellbar).
Auf dem Display an der Sonarstation sollte der aktuelle Winkel stehen.
[ame]http://www.youtube.com/watch?v=bRSOBUqr7ag[/ame]
Was fehlt?
Zeit und Motivation weiterzumachen
Respektive ganz abgesehen davon: Das Ding fliegt noch nicht. Und das sollte
es ja eigentlich. Gibt ja diesen lustigen Grav-Controller, womit das Schweben selbst
bei Schwerkraft kein Problem wäre.
Aber dann bräuchte das alles noch eine Stabilisierungslogik undundund...
Na mal schaun.
Falls sich noch was tut, werde ich es hier posten.




 Zitieren
Zitieren







